|
JACK-AUDIO-CONNECTION-KIT
|
The JACK Audio Connection Kit provides simple transport interfaces for starting, stopping and repositioning a set of clients. This document describes the overall design of these interfaces, their detailed specifications are in <jack/transport.h>
The former transport master role has been divided into two layers:
Existing transport clients continue to work in compatibility mode. But, old-style timebase masters will no longer control the transport.
The timebase master continuously updates extended position information, counting beats, timecode, etc. Without this extended information, there is no need for this function. There is at most one master active at a time. If no client is registered as timebase master, frame numbers will be the only position information available.
The timebase master registers a callback that updates position information while the transport is rolling. Its output affects the following process cycle. This function is called immediately after the process callback in the same thread whenever the transport is rolling, or when any client has set a new position in the previous cycle. The first cycle after jack_set_timebase_callback() is also treated as a new position, or the first cycle after jack_activate() if the client had been inactive.
When a new client takes over, the former timebase callback is no longer called. Taking over the timebase may be done conditionally, in which case the takeover fails when there is a master already. The existing master can release it voluntarily, if desired.
If the timebase master releases the timebase or exits the JACK graph for any reason, the JACK engine takes over at the start of the next process cycle. The transport state does not change. If rolling, it continues to play, with frame numbers as the only available position information.
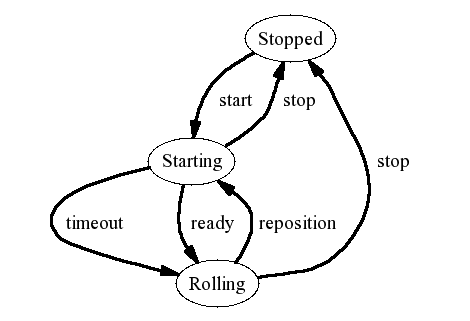
The JACK engine itself manages stopping and starting of the transport. Any client can make transport control requests at any time. These requests take effect no sooner than the next process cycle, sometimes later. The transport state is always valid, initially it is JackTransportStopped.
The engine handles polling of slow-sync clients. When someone calls jack_transport_start(), the engine resets the poll bits and changes to a new state, JackTransportStarting. The sync_callback function for each slow-sync client will be invoked in the JACK process thread while the transport is starting. If it has not already done so, the client needs to initiate a seek to reach the starting position. The sync_callback returns false until the seek completes and the client is ready to play. When all slow-sync clients are ready, the state changes to JackTransportRolling.
This callback is a realtime function that runs in the JACK process thread.
Clients that don't declare a sync_callback are assumed to be ready immediately, any time the transport wants to start. If a client no longer requires slow-sync processing, it can set its sync_callback to NULL.
There must be a timeout to prevent unresponsive slow-sync clients from completely halting the transport mechanism. Two seconds is the default. When this timeout expires, the transport will start rolling, even if some slow-sync clients are still unready. The sync_callback for these clients continues being invoked, giving them an opportunity to catch up.
These request a new transport position. They can be called at any time by any client. Even the timebase master must use them. If the request is valid, it goes into effect in two process cycles. If there are slow-sync clients and the transport is already rolling, it will enter the JackTransportStarting state and begin invoking their sync_callbacks until ready.
Transport clients were formerly known as "transport slaves". We want to make it easy for almost every JACK client to be a transport client.
This function can be called from any thread. If called from the process thread, pos corresponds to the first frame of the current cycle and the state returned is valid for the entire cycle.
During the transition period we will support the old-style interfaces in compatibility mode as deprecated interfaces. This compatibility is not 100%, there are limitations.
The main reasons for doing this are:
These deprecated interfaces continue to work:
Unfortunately, the old-style timebase master interface cannot coexist cleanly with such new features as jack_transport_locate() and slow-sync clients. So, these interfaces are only present as stubs:
For compatibility with future changes, it would be good to avoid structures entirely. Nevertheless, the jack_position_t structure provides a convenient way to collect timebase information in several formats that clearly all refer to a single moment. To minimize future binary compatibility problems, this structure has some padding at the end, making it possible to extend it without necessarily breaking compatibility. New fields can be allocated from the padding area, with access controlled by newly defined valid bits, all of which are currently forced to zero. That allows the structure size and offsets to remain constant.
This design currently does not address several issues. This means they will probably not be included in JACK release 1.0.

